2005擭偺岝働媢僀儞儔僀儞僼僃僗僥傿僶儖偵岦偗偰嶌惉偟偨丄岝揹娗僔僗僥儉偵偮偄偰夞楬偲摦嶌偵偮偄偰偺愢柧傪婰榐偟偰偍偒傑偡丅
慜採忦審
栚揑偼僀儞儔僀儞僗働乕僩偺僗僺乕僪應掕側偺偱丄偦偺慜採偱峫偊傑偡丅30m傪5昩掱搙偱幘憱偡傞懍搙偺懌偑捠夁偡傞偺傪専弌偱偒側偄偲偄偗傑偣傫丅懌傪10cm掱搙偲偟偰丄梋桾傪尒偰10m/s偱捠夁偡傞偲偡傞偲丄捠夁帪娫偼10ms偲側傝傑偡丅偙偺帪娫偺岝懇偺幷抐傪専弌偱偒傟偽椙偄偙偲偵側傝傑偡丅
師偵専弌偺嫍棧偱偡偑丄嵟掅偱傕婡嵽傪僷僀儘儞偺埵抲偐傜嵍塃偵1.5m掱搙偼奐偗偰偍偐側偄偲丄埨慡惈乮恖偵傕婡嵽偵傕乯偑妋曐偱偒傑偣傫偺偱丄3m埲忋偺娫妘傪奐偗偰傕忋婰忦審傪妋曐偱偒側偄偲偄偗傑偣傫丅
摦嶌奣梫
埲忋傪摜傑偊偰奣梫愝寁偱偡丅傑偢偼専弌晹丅僼僅僩僟僀僆乕僪傪巊偆偲旝彫揹埑偺傾儞僾偺SN摍乆偺傾僫儘僌晹暘偱嬯楯偡傞偺傕寵偩偟丄偦傕偦傕嵞尰惈埆偔側傞偲斝晍偲偐傕偟偵偔偔側傞偺偱丄偍婥寉偵愒奜慄儕儌僐儞偺庴岝IC傪巊偭偪傖偄傑偡丅偳偙偧偺儁乕僕偱尒偨傾僀僨傾偱偡偑丄偄偨偩偄偪傖偄傑偡丅妋偐偵挿嫍棧偺揱憲偵傕懴偊傞偟丄擔岝傗僀儞僶乕僞乕側偳偺僲僀僘懴惈偵傕嫮偔嶌傜傟偰偄傞偺偱丄岲揔偱偡丅偝傜偵僼僅僩Di,僼僅僩Tr傪巊偭偰Discrete偱慻傓偺傛傝丄梱偐偵埨偄丅廐梩尨壙奿偩偲僼僅僩Di偲偁傫傑傝抣抜曄傢傜側偄偱偡丅
偲偄偆偙偲偱丄儕儌僐儞梡偺庴岝IC傪巊偆偺偱丄愒奜LED偼38KHz偱曄挷偡傞偙偲偵側傝傑偡丅偙偙偱丄偨偩38KHz偱曄挷偟偨怣崋傪偢乣偭偲棳偟偰偟傑偆偲丄偁偭偲偄偆娫偵AGC偑弴墳偟偰偟傑偭偰弌椡偑弌側偔側偭偰偟傑偄傑偡丅偦偙偱丄偪傚偭偲弌偟偰偼媥傒丄偪傚偭偲弌偟偰偼媥傒偲偄偆偙偲偱敪岝偝偣偰傗傜側偄偲偄偗傑偣傫丅媥傒偺娫偵捠夁偝傟偰偟傑偭偰偼専弌偱偒側偔側偭偰偟傑偆偺偱丄梋桾傪尒偰593.75Hz乮38kHz偺64暘廃乯偱敪岝乛掆巭傪孞傝曉偡傛偆偵偟傑偡丅偙傟偱1.7ms偵1夞偼敪岝偡傞偙偲偵側傝傑偡丅1/8僨儏乕僥傿乕偲偟偨偺偱丄侾敪岝廃婜偵38kHz偺僷儖僗偑8屄擖傞偙偲偵側傝傑偡丅
偙傟傪庴岝偡傞偲丄593.75Hz偺僷儖僗怣崋偑摼傜傟傞偙偲偵側傝傑偡丅偙傟偺帟敳偗傪専弌偡傞傢偗偱偡偑丄儊僀儞僋儘僢僋傪梡堄偡傞偺傕戝偘偝側偺偱丄崱夞偼儕僩儕僈儔僽儖偺儚儞僔儑僢僩傪巊偄傑偟偨丅
儚儞僔儑僢僩儅儖僠僶僀僽儗乕僞偺儕僩儕僈儔僽儖偭偰偲偙傠偑儈僜偱丄偙傟傪偆傑偄偙偲巊偭偰偁傝傑偡丅乮帺夋帺巀乯儚儞僔儑僢僩偺掕悢傪崱夞偼3.7ms掱搙偵偟偰偁傝傑偡丅偙偙偵僷儖僗怣崋偑擖偭偰偔傞偲丄Q偑3.7ms偩偗弌椡偝傟傑偡丅偑丄僷儖僗偼1.7ms枅偵傗偭偰偒傑偡偐傜丄3.7ms偺僷儖僗傪弌偟偰偄傞娫偵嵞搙僩儕僈偑偐偐偭偰丄偦偙偐傜傑偨3.7ms偺僷儖僗偑弌椡偝傟傞傢偗偱偡丅偲側傞偲丄偢偭偲僷儖僗偼弌偭傁側偟偵側偭偰丄Q偼H偵挘傝晅偄偰偟傑偆傢偗偱偡丅
偙偙偱丄岝懇傪幷偭偰僷儖僗偑敳偗傞偲偳偆側傞偱偟傚偆丅嵟屻偺僷儖僗偐傜3.7ms埲壓偱師偺僷儖僗偑棃側偄偲丄偄偭偨傫Q偼L偵棊偪偰偟傑偄傑偡丅偲偄偆偙偲偼幷抐偺専弌僷儖僗偑摼傜傟偨偙偲偵側傝傑偡丅偙偺僱僈僥傿僽僄僢僕傪僩儕僈偵偟偰丄偝傜偵儚儞僔儑僢僩偱専弌僷儖僗傪嶌偭偰偄傑偡丅乮儌僯僞梡偺LED偱栚帇偟傗偡偄傛偆偵挿傔偺僷儖僗偵偟偰偁傝傑偡乯
庴岝晹懁偱偼埲忋偺夞楬傪2慻嵍塃偵幚憰偟偰偁傝傑偡丅奺僽儘僢僋偐傜偺弌椡傪傑偨傑偨儚儞僔儑僢僩傪偵撍偭崬傫偱偁偭偰丄屳偄偵Q僶乕傪憡庤偺CLR偲B偵愙懕偟偰偁傝傑偡丅偙傟偱丄愭偵Q偑弌偨傎偆偑桪愭偱丄憡庤傪僋儕傾偐偮僩儕僈嬛巭忬懺偵屌掕偡傞偙偲偵側傝傑偡丅Q偐傜LED偵弌椡偡傟偽丄愭拝敾掕偲偄偆偙偲偵側傞傢偗偱偡丅
嵍塃偺儗乕儞偵攝抲偟偨愒奜慄搳岝婍偺僋儘僢僋偼摨婜偟偰偄傑偣傫偺偱丄曅曽偺敪岝媥巭婜娫拞偵暿偺儗乕儞偺幷抐偑専弌偝傟傞偙偲偑偁傞偺偱丄尩枾偵尵偆偲1.7ms埲撪偺愭拝偼岆敾掕傪偡傞応崌偑偁傝偊傑偡丅6m/s偱憱峴偟偰偒偰偄傞偲偟偰丄1cm埲撪偺嵎偼岆敾掕偡傞壜擻惈偑偁傞偙偲偵側傝傑偡丅偙傟傪旔偗傞偨傔偵偼丄僋儘僢僋傪摨婜偟偰傗傞偟偐側偄偱偡偹丅晉巑揹婡偺岝揹娗偺傛偆偵斀幩宆偵偟偰丄慡晹傪堦儢強偵傑偲傔偰傗傜側偄偲擄偟偄偱偡偹丅乮偙傟偼偙傟偱愒奜慄偺楻傟傗嬤愙斀幩偺塭嬁偑偁偭偰擄偟偐偭偨偺偱丄搳岝婍乛庴岝婍暘棧宆偺峔惉傪偲偭偰偄傞傢偗側傫偱偡偑乯傑偀丄恖娫偺敾掕傛傝傕偩偄傇惛搙偑崅偄偺偱姩曎偟偰偔偩偝偄丅
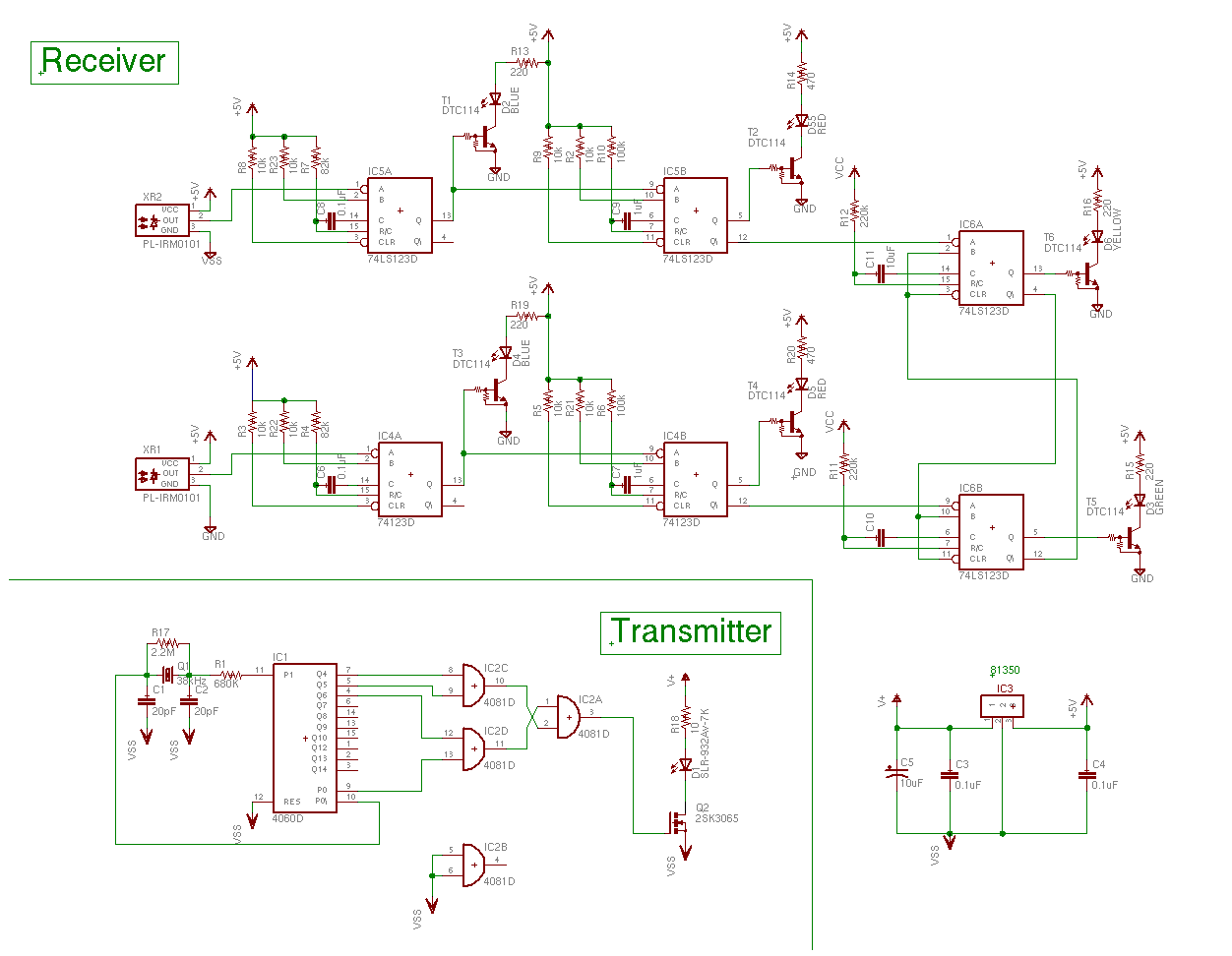
嵶偐偄夞楬偺愢柧偵擖傝傑偟傚偆丅傑偢偼夞楬恾傪宖嵹丅
憲怣婡
昗弨揑側CMOS Logic偺4060傪巊偭偨敪怳仌暘廃夞楬偱偡丅3V揹尮乮扨3 x 2杮乯傪慜採偵偟偰偄傑偡偑丄庒姳敪怳偟偯傜偄偙偲傕偁傞傛偆偱偡丅傕偆彮偟掕悢傪捈偡傋偒偐傕丅4.5V埲忋側傜妝偵敪怳偟偰偔傟傑偡丅38kHz偺悈徎偼廐寧偵偁傝傑偡丅4060偼庒姳擖庤偟偢傜偔側偭偰偄傞傛偆偱偡偑丄楅彜偵偼傑偩巆偭偰偄傞傛偆偱偡丅4069偱敪怳偟偰4040偱暘廃偡傞傛偆偵偱傕偟偨傎偆偑椙偄偐傕偟傟傑偣傫丅僼儔僢僩僷僢働乕僕昳傪巊偭偰僷僞乕儞愝寁傪偡傞嵺偵偼偦偭偪偐側丅
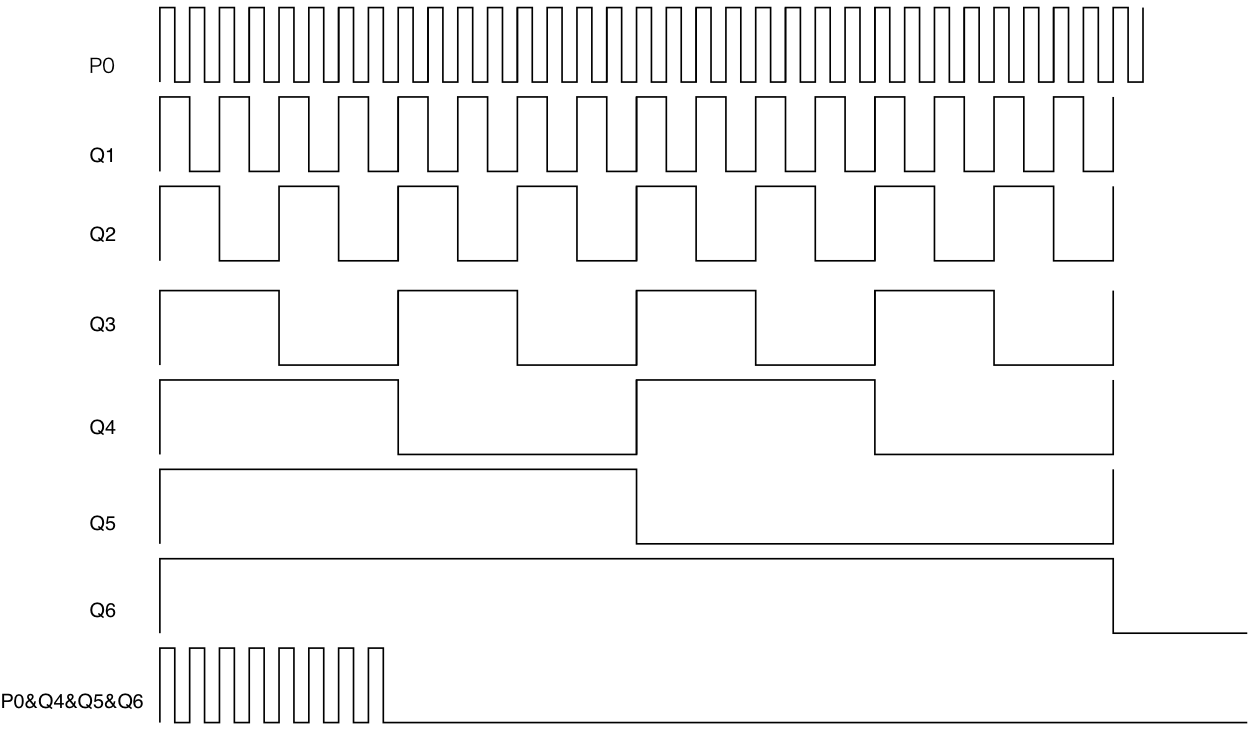
38KHz偺怣崋乮P0)偲Q4(16暘廃)丄Q5(32暘廃)丄Q6(64暘廃)偺4偮傪4081偱AND傪庢偭偰丄1/8僨儏乕僥傿乕(P0偱64僋儘僢僋偺愭摢偺8屄偩偗弌偰偔傞)偺LED僪儔僀僽梡偺怣崋傪摼傑偡丅乮攇宍乯強朷偺怣崋偑弌偨傜丄偁偲偼愒奜慄LED傪僪儔僀僽偟偰傗傞偩偗偱偡丅愒奜LED偵偼丄嶰梞偺SLR-932Av-7K傪巊偄傑偟偨丅愮愇揹彜偱攦偊傑偡丅曄側斀幩岝偑弌偰岆摦嶌偟側偄傛偆偵丄LED偵偼崟偄擬廂弅僠儏乕僽傪旐偣偰丄岝幉埲奜偵晄梫側鐃幩偑偱側偄傛偆偵偟傑偡丅
FET偼Idss偑1A掱搙偁傞PowerMOS FET側傜壗偱傕椙偄偐側偲巚偄傑偡丅偙傟傕庤帩偪偺昞柺幚憰昳傪巊偄傑偟偨丅揹尮揹埑傕掅偄偺偱姰慡偵僗僀僢僠偟傑偣傫偗偳丄揹棳偑150mA掱搙側偺偱戝忎晇偱偟傚偆丅10兌偺掞峈偼150mA棳偡偺偱丄0.15x0.15x10 = 0.225W偺懝幐偵姮偊側偄偲偄偗側偄傢偗偱偡偑丄僷儖僗嬱摦偱Duty偑1/16偵側傞偺偱(1/8偺弌椡婜娫偺Duty傕50%偩偐傜)14mW掱搙偁傟偽椙偄偺偱丄僠僢僾掞峈偱傕戝忎晇側偼偢偱偡丅
庴怣婡
儕儌僐儞庴岝IC偼38KHz昳側傜側傫偱傕椙偝偘側傫偱偡偑丄廐寧偱攦偊傞暔偱偼CRVP1738偑懳僲僀僘惈偲偐傕椙偄姶偠偑偟偰偄傑偡丅夞楬恾偺PL-IRM0101偼偪傚偭偲僲僀僘乮擔幩側偳傕娷傔偰乯偵庛偄婥偑偟傑偡丅摦嶌偼奣梫偺曽偱婛偵弎傋偰偁傞偺偱丄偁傑傝愢柧偼昁梫側偄偱偟傚偆丅惵丄椢丄墿怓偺LED偼Vf偑崅偄偺偱丄愒偺LED偲斾傋偰揹棳惂尷掞峈傕彫偝傔偱偡丅偡傋偰廐寧偺崅婸搙昳乮挻偼晅偐側偄掱搙乯傪巊偭偰偁傝傑偡丅暿偵尒偊傟偽壗偱傕椙偄偲巚偄傑偡丅
揹尮偼儕儌僐儞庴岝IC偑5V昳側偺偱丄5V偱偡丅81350偼掅僪儘僢僾偺3抂巕儗僊儏儗乕僞偱偡丅傕偆惗嶻拞巭側偺偱丄廐寧偱儕僯傾僥僋僲儘僕乕偺戙懼昳偵曄傢偭偰偄傑偡丅庤帩偪偺僗僩僢僋偑偁傞偺偱丄偙傟傪巊偭偨傑偱偱偡丅LED偺僪儔僀僽偵偼掕斣偺儘乕儉偺僨僕僩儔傪巊偭偰偁傝傑偡偑丄嵟嬤偺儘僕僢僋IC(AHC偲偐LV偲偐丄側傫偐偦傫側偺)偱傕擖庤偱偒傟偽丄20mA偔傜偄堷偭挘傟傞偺傕偁傞傜偟偄偺偱丄偦偺傑傑偱傕LED偺揰摂偔傜偄偱偒偪傖偆偐傕偟傟傑偣傫丅僷僗僐儞偼夞楬恾偵擖偭偰傑偣傫偗偳丄揔媂憓擖偟偰偔偩偝偄丅
崱屻偺梊掕
偙傟傪偝傜偵夵椙偟偰僗僩僢僾僂僅僢僠偲愙懕偡傞僀儞僞乕僼僃乕僗偑偱偒偰偄傑偡丅偙偺庴怣婡偺弌椡偵掕揹棳弌椡偺僪儔僀僽夞楬傪偮偗偰丄挿乣偄揹慄偺岦偙偆偺僼僅僩僇僾儔傪僪儔僀僽偡傞傛偆偵側偭偰偄傑偡丅傑偩丄偛偔偛偔扨弮側傕偺側偺偱丄偙傟傕夵椙偟偰宖嵹偟偨偄偲偙傠偱偡丅
偝傜偵丄30m偺働乕僽儖傪庢傝埖偆偺傕柺搢側偺偱丄僗僞乕僩乛僑乕儖娫偺儚僀儎儗僗壔偵庢傝慻傫偱偄傑偡丅偄傑偺偲偙傠偺桳朷姅偼僗僩儘儃偵傛傞専弌丅偄偪偍偆20m偔傜偄偺嫍棧側傜専弌偱偒傞偙偲偑妋擣偱偒偰偄傑偡偺偱丄偙傟傪姰惉偝偣偰岞奐偟偨偄偲偙傠偱偡丅
屻偼丄扨弮側僗僩僢僾僂僅僢僠偱側偔偰丄儅僀僐儞傪巊偭偰傕偭偲僀儞僥儕僕僃儞僩側僔僗僥儉偲偟偰寁應僔僗僥儉傪嶌傝忋偘偨偄偲偙傠偱偡丅偄傠偄傠峔憐偩偗偼惙傝忋偑偭偰偄傞偺偱丄惪偆偛婜懸偭偰偲偙傠偱偟傚偆偐丅傕偪傠傫壆奜巊梡偑慜採偱偡偺偱丄僷僜僐儞儗僗偱偡丅
{kind=link}
{kind=link}